-
Motivace
Motivací je vyvinout a zprovoznit systém poskytující real-timová data o pracovním prostoru robotu, především pak o překážkách, které se v něm mohou vyskytnout. Následně je možné na tuto skutečnost reagovat, např. zastavením robotu nebo sofistikovanějším způsobem – pokud to technologické požadavky trajektorie umožní – upravit dráhu a překážce se vyhnout bez zastavení pohybu.
-
Komerční využití
Navržený systém poskytuje data o překážkách v definovaném pracovním prostoru robotu. Primárně je určen pro sdílené pracoviště člověk – kolaborativní robot. Systém je použitelný např. jako součást zabezpečovacího systému robotizovaného pracoviště.
-
Fáze vývoje
Funkční vzorek je odzkoušený a pokračuje se na vývoji a zdokonalování jeho subsystémů – automatická kalibrace 3D kamer, optimalizace umístění kamer s ohledem na konkrétní scénu, filtrace 3D dat, predikce dráhy pohybující se překážky (překážek) a další.
-
Popis
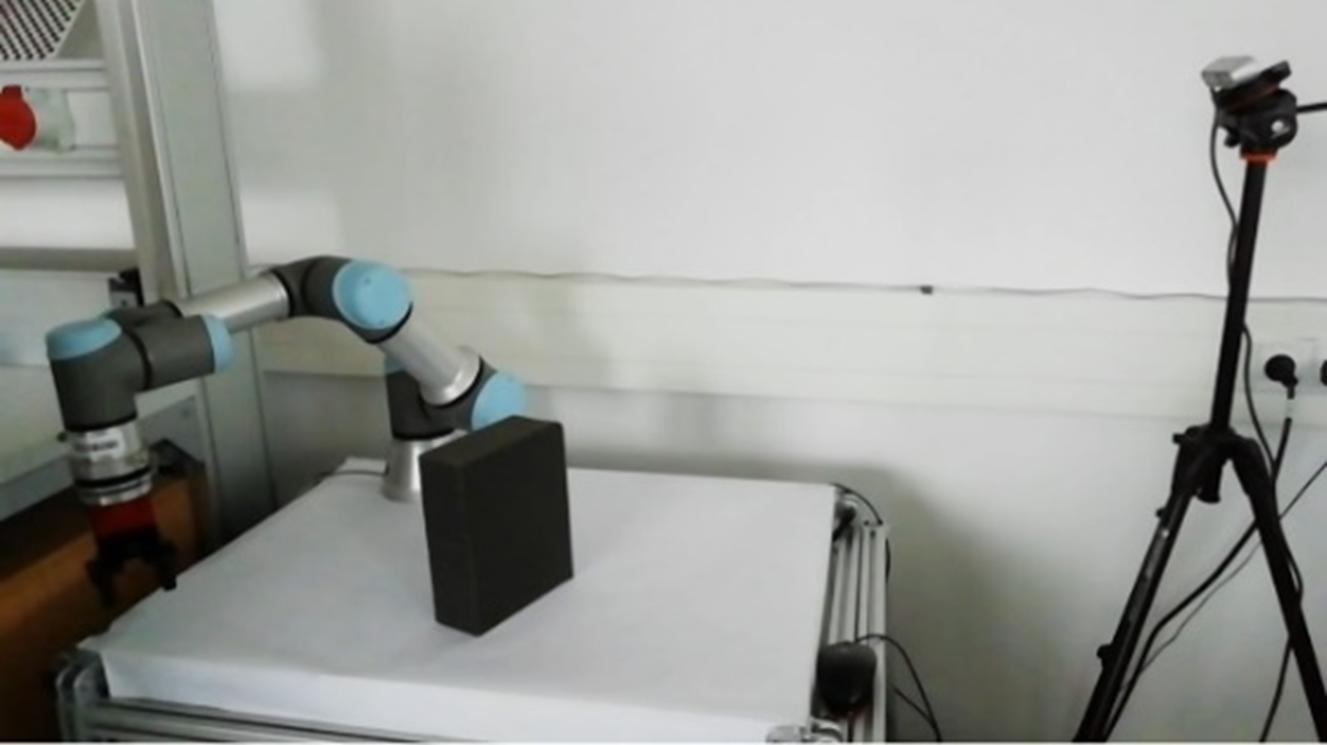
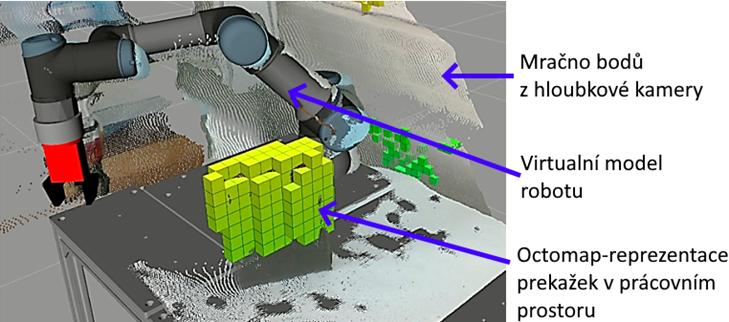
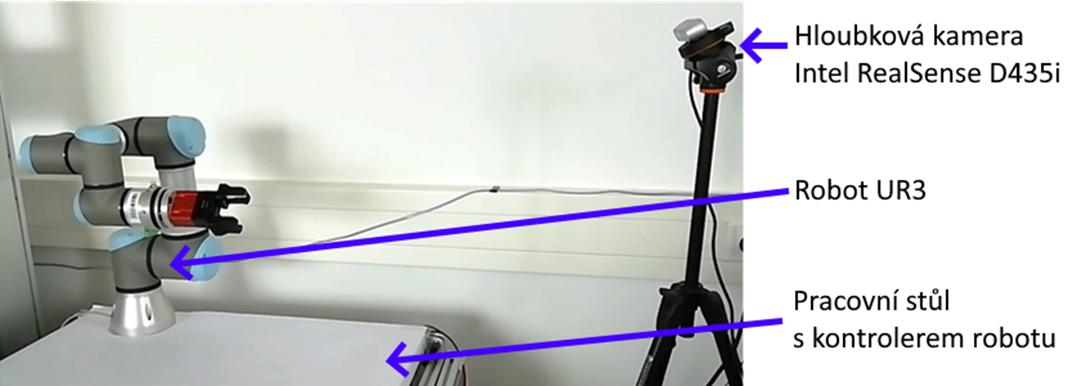
Výsledkem je vytvořený experimentální stend monitorující překážky (i dynamicky se měnící) ve sdíleném pracovním prostoru kolaborativního robotu pomocí 3D kamer. Pracoviště s kolaborativním robotem (testy probíhaly na robotu UR3) je z pohledu HW složeno z pracovního stolu, ke kterému je připevněn robot. Hloubková kamera (kamery) je libovolně umístěna v prostoru tak, aby snímala pracovní prostor robotu. SW pracoviště zajistí synchronizaci digitální kopie statické scény (robotu, stolu, periferií) a detekuje překážky, které se objeví v pracovním prostoru.
-
Další informace
Technické parametry výsledku: kamera/kamery Intel Realsense D435i – 1280x720 [px], 30 [fps], Robot Universal Robot UR3 – maximální nosnost 3[kg], dosah 500 [mm], maximální rychlost 1 [m/s], počítač Intel Core i5 8259U Coffee Lake 3.8 GHz, Intel Iris Plus Graphic 655, RAM 8GB DDR4, SSD 126 GB, překážky – statické / dynamické
-
Způsob ochrany
Funkční vzorek (interní označení 045/16-11-2020_F)
-
Hledání partnera
Licencování nebo spolupráce na vývoji
-
Kontakt
Prof. Dr. Ing. Petr Nováky
Katedra robotiky, VŠB - TU Ostrava -
Vlastník technologie