-
Motivace
Motivací je vyvinout systém umožňující rychlé nasnímání požadované trajektorie (koncového bodu robotu) přímo na zamýšleném (reálném) pracovišti s důrazem na nízké finanční náklady a tedy použitelnost i u malých a středních firem, které robotizují svá pracoviště, primárně s kolaborativním robotem/roboty.
-
Komerční využití
Navržený systém má využití v rámci robotizace již existujícího pracoviště, primárně kolaborativním robotem. Systém umožní jednoduše nasnímat požadovanou trajektorii, včetně orientace koncového bodu. Následně pak provést výběr vhodného typu robotu v některém simulačním, projekčním SW s ohledem na nasnímanou trajektorii.
-
Fáze vývoje
Systém je odzkoušený a pokračuje se na doplnění dalších funkcionalit – např. nasnímání 3D pracovního okolí celého reálného pracoviště.
-
Popis
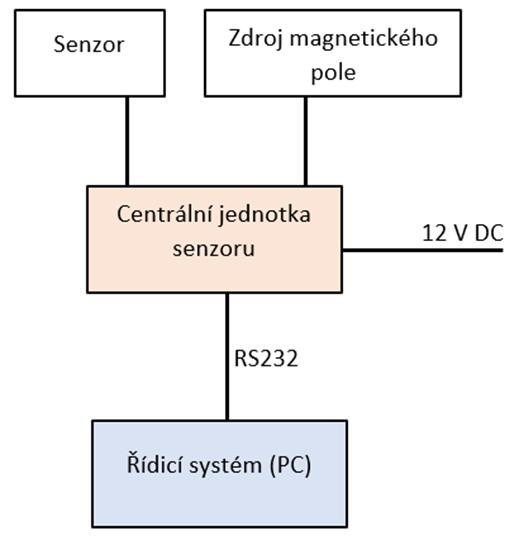
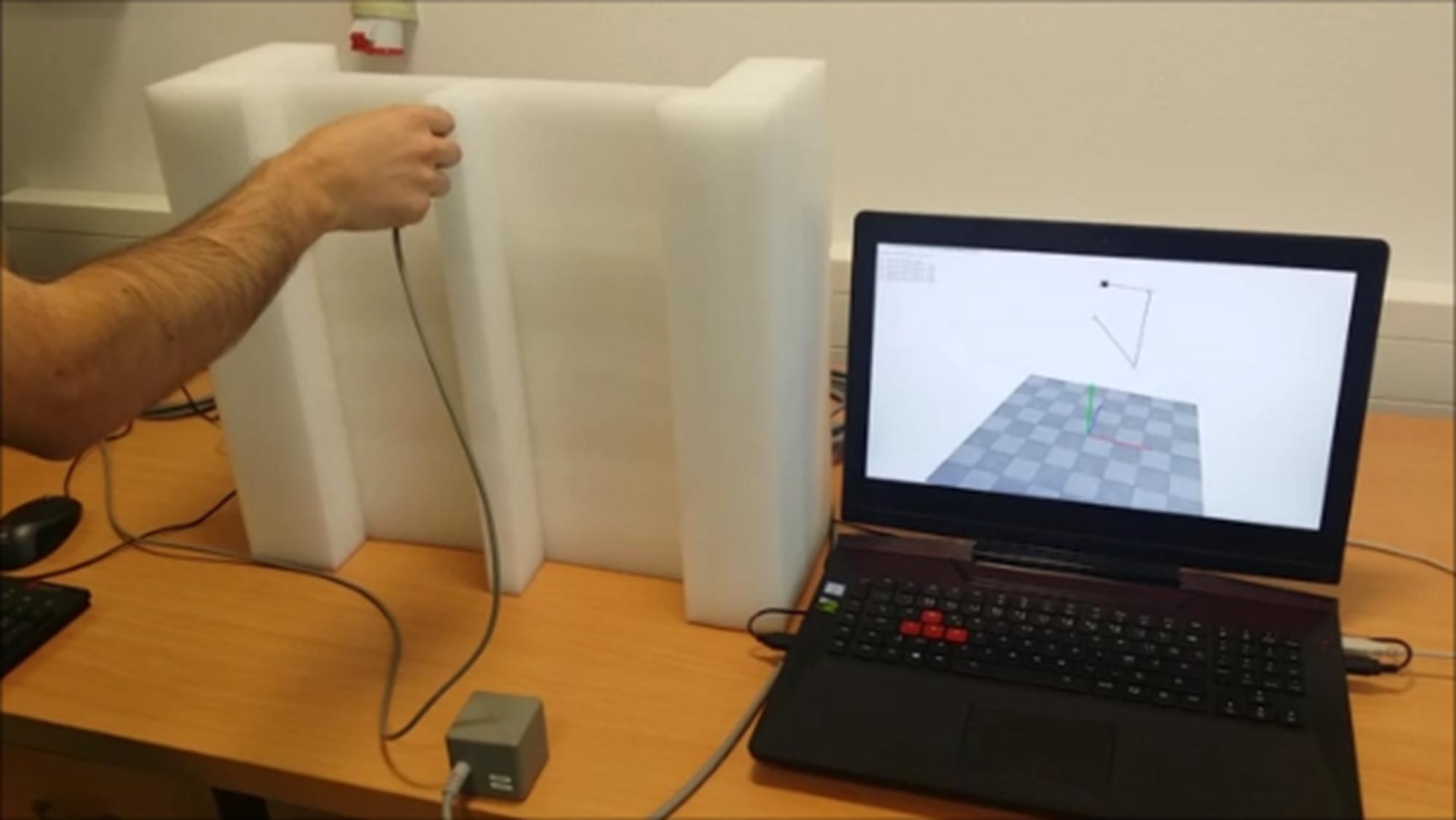
Funkční vzorek představuje systém pro online snímání požadované trajektorie pohybu koncového bodu průmyslového nebo kolaborativního robotu. Systém umožňuje přímo na pracovišti robotu definovat v hrubých rysech trajektorii, včetně orientace případného efektoru/nástroje, a to jednoduchým umísťováním senzoru do požadovaných klíčových pozic na trajektorii. Tyto klíčové body jsou poté spojeny do uzavřené křivky trajektorie pomocí přímkových nebo obloukových úseků vytvořených mezi klíčovými body prostřednictvím příslušného řídicího systému.
-
Další informace
Technické parametry výsledku: 6 měřených souřadnic (3 pro polohu a 3 pro natočení), spojité snímání s frekvencí 60 Hz, statická chyba 0,25 cm pro polohu a 0,75° pro orientaci, rozlišení 0,0038 cm (0,1° pro orientaci) do vzdálenosti 30 cm od zdroje, maximální dosah 152 cm, komunikace s řídicím systémem po sériové lince RS232, softwarová podpora v podobě C++ dynamické knihovny PDI.dll., vlastní SW pro snímání, vizualizaci a editaci trajektorie.
-
Způsob ochrany
Funkční vzorek (interní označení 040/04-12-2019_F)
-
Hledání partnera
Licencování nebo spolupráce na vývoji
-
Kontakt
Prof. Dr. Ing. Petr Novák
Katedra robotiky, VŠB - TU Ostrava -
Vlastník technologie